www.sescsp.org.br/programacao/198763_CO...
pt.wikipedia.org/wiki/Raspberry_Pi
we.riseup.net/assets/572774/Captura+de+...
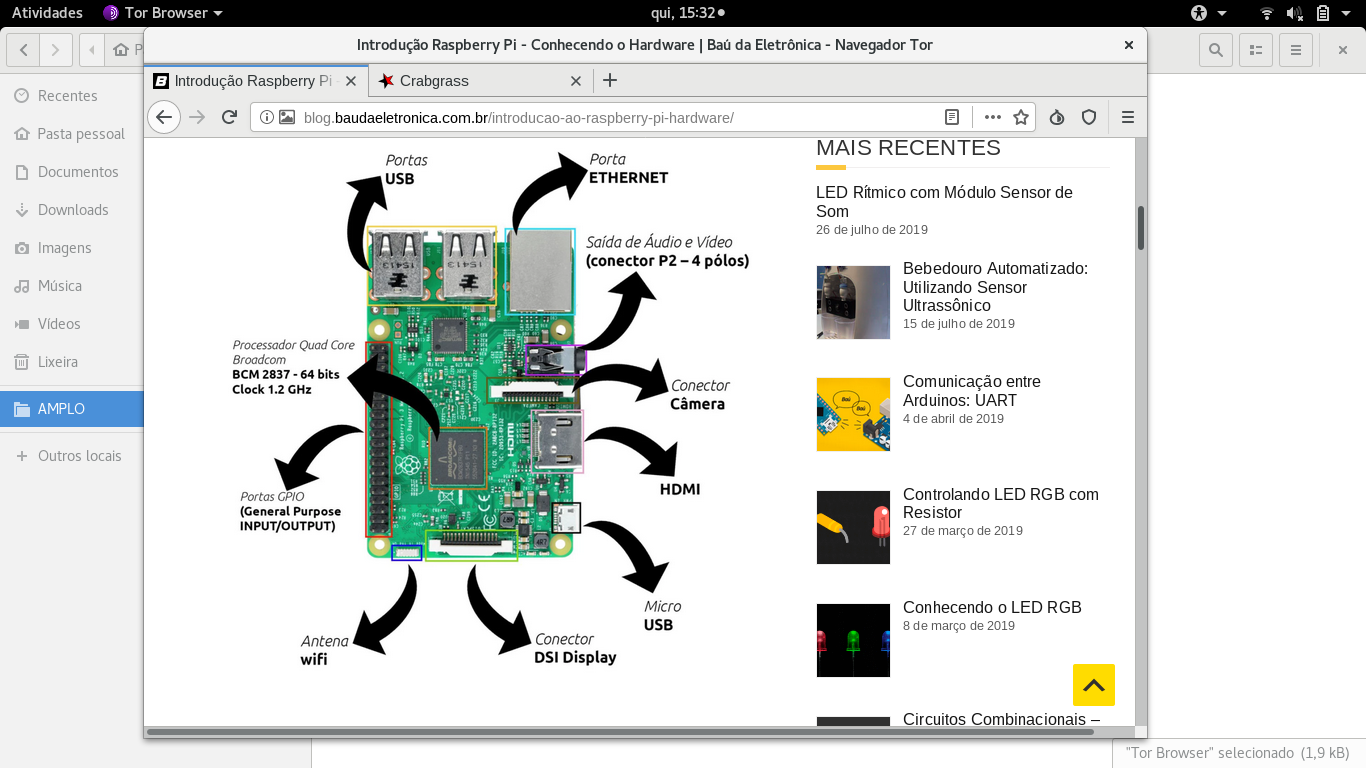
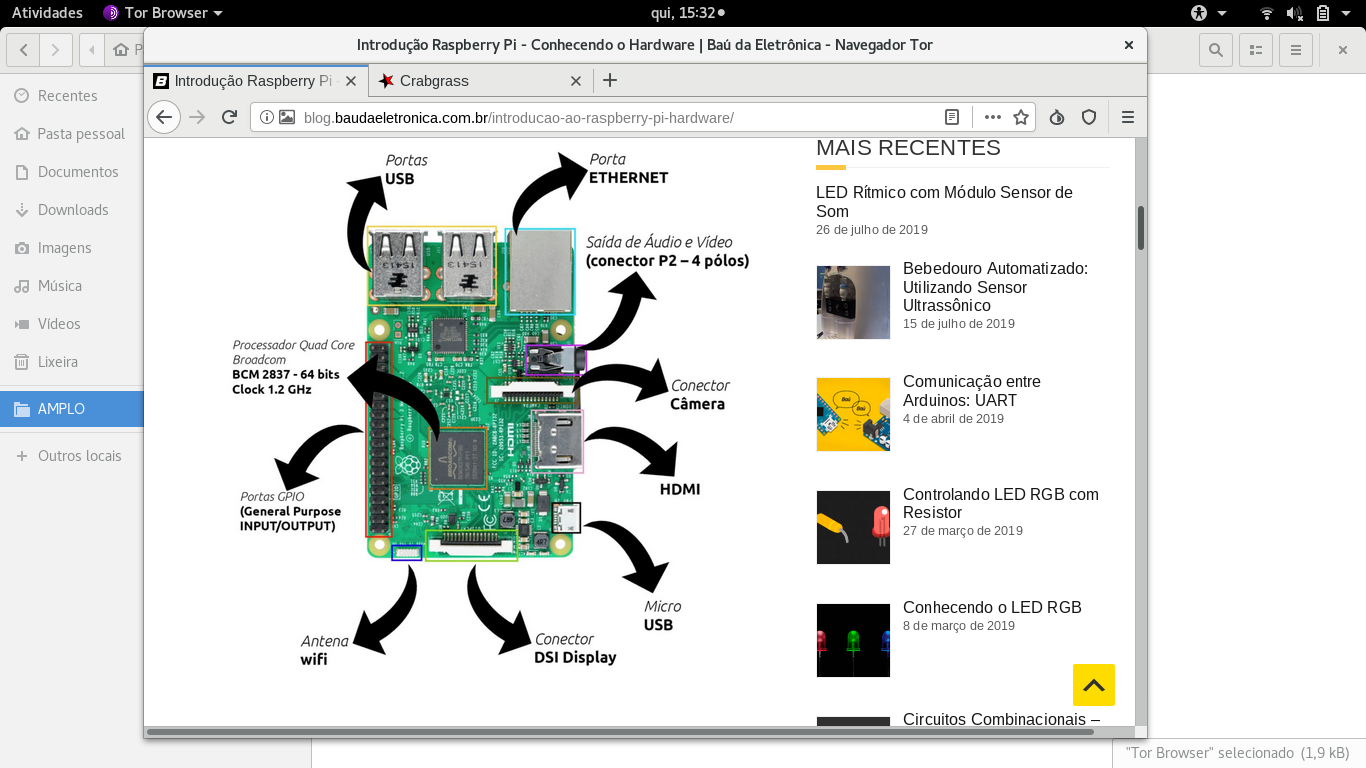
blog.baudaeletronica.com.br/introducao-.../
retropie.org.uk/docs/First-Installation/
archive.recalbox.com/
retropie.org.uk/about/systems
www.filipeflop.com/blog/fliperama-com-r.../
www.lakka.tv/
www.lakka.tv/get/macos/
weloveteach.com/site/artigo/configurand...
www.filipeflop.com/blog/interface-grafi.../
www.embarcados.com.br/sistema-web-com-r.../
www.embarcados.com.br/primeiros-passos-.../
www.embarcados.com.br/kernel-linux-para.../
sergioprado.org/como-desenvolver-um-sis.../
www.if.ufrj.br/~gpenello/Lab2_2018-1/Gu...
|
Há duas opções para o download do Raspbian, sendo uma com ambiente Desktop e outra sem o ambiente (somente linha de comandos). interface wlan0 |
|
|
Como compilar a última versão do Kernel Linux, direto do código fonte da árvore GIT do seu criador, para nossa Raspberry Pi 3B+. O repositório oficinal com o código fonte do Kernel para a Raspberry Pi é github.com/raspberrypi/linux que é um fork do Para compilar o Kernel: 2- Baixar o código fonte do repositório do Linus Torvalds 3- Com todo o código do Kernel configure a compilação : O retorno deve ser parecido com o da figura em anexo. O que o comando significa: CROSS_COMPILE=arm-linux-gnueabihf-: Estamos compilando o Kernel em uma máquina rodando em um processador Intel x86. Então precisamos dizer para o make que vamos “cross compilar” o Kernel utilizando os compiladores do pacote arm-linux-gnueabihf-; multi_v7_defconfig: Por fim o último argumento é o arquivo de defconfig (definição de configuração). |
|
|
4- Se navegarmos dentro das pastas do código fonte do Kernel Linux podemos chegar até os arquivos de configuração necessários: No caso da Raspberry Pi 3B, 3B+, e outras placas baseadas na arquitetura ARM, vamos utilizar as configurações definidas no multi_v7_defconfig. 5 -Após escolher as configurações compilar usando o comando: make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- zImage modules dtbs -j 8 Como resultado devemos ter o que é mostrado na segunda imagem indicnadoCom isso teremos gerado a imagem do Kernel para nosso Raspberry Pi 3B+. |
|
|
zImage : é o tipo de imagem do Kernel que queremos como output da compilação, o zImage é uma imagem comprimida que se auto extrai durante o boot; modules : a Raspberry Pi utiliza alguns periféricos, por exemplo WiFi. O chip do WiFi precisa de um driver no Kernel, esse driver na configuração da imagem do Kernel é selecionado como module, um driver que pode ser carregado ao sistema sem precisar fazer parte da imagem do Kernel, um arquivo a parte. Passando o argumento modules estamos dizendo ao make para compilar todos os drivers e módulos (são as saídas de arquivos com extensão *.ko que vemos durante a compilação do Kernel); dtbs : esse argumento diz ao make para compilar todos os Device Trees configurados pelo defconfig. Os Device Trees são de grande importância para descrição do hardware para o Kernel, são eles que irão definir quais periféricos utilizarão quais GPIOs e os estados dos pinos, output, input, pull down e etc; -j 8 : o argumento -j ou –jobs diz ao make para compilar nosso Kernel utilizando processos em paralelo. Por exemplo meu computador tem 8 núcleos então eu posso passar “-j 8” para o make e ele ira compartilhar tarefas durante a compilação a todos os meus núcleos. Isso diminui bastante o tempo total de compilação. |
|
|
6 – Para testar nossa nova imagem do Kernel vamos utilizar uma instalação do Raspbian já gravada em um SD card. Conecte e monte o SD card no seu Linux. Vamos copiar os seguintes arquivos para a partição boot do SD card: cp arch/arm/boot/zImage /media/castello/boot/ cp arch/arm/boot/dts/bcm2837-rpi-3-b-plus.dtb /media/castello/boot/ Você copiou o arquivo zImage, e o Device Tree Binary com a descrição de hardware que o Kernel precisa para o Raspberry Pi 3B+, o arquivo bcm2837-rpi- 3-b-plus.dtb.7 – Copiar os módulos, arquivos com extensão *.ko criados durante a compilação sudo make INSTALL_MOD_PATH=/media/castello/rootfs/ modules_install sudo é necessário aqui por que estamos copiando os módulos para uma partição ext, rootfs do SD card 8- Troque os caminhos /media/castello/rootfs/ e /media/castello/boot/ dos comandos acima pelo caminho aonde estará montado a partição boot e rootfs do SD card do Raspbian no seu computador. 9 – configurar o bootloader da Raspberry Pi para carregar nosso novo Kernel, já que os novos arquivos não seguem o padrão que ele irá procurar. Abra o arquivo config.txt da partição boot do SD card e inclua o seguinte no final do arquivo:
cat /proc/version |
|
|
Construção de fliperamas em Raspberry Acionamento da placa Raspberry 2- Fazer todos os testes de energia da placa, testando o cartão SD. “HD”. A imagem escolhida foi Retropie. O que foi feito para o Retropie funcionar? Depois montar o Joystick |
|
|
dd if=/imagemorigem of=/discodestino /home/amplo/Downloads/imagens*para*fliperama/Lakka-RPi2.arm-2.2.2.img dd if=/imagemorigem of=/discodestino dd if=/home/amplo/Downloads/imagens-fliperama/retropie-4.5.1-rpi2_rpi3.img of=/dev/mmcblk0p1 ou outro exemplo de origem: /home/amplo/Downloads/imagens-fliperama/Lakka-RPi2.arm-2.2.2.img |
|
|
site: instructables.com Ergonomia dos Fliperamas e Games: 2° Dia |
|
DRAGONRISE GENERIC JOYSTICK forum.recalbox.com/topic/4156/zero-dela... bugs.launchpad.net/ubuntu/+source/linux... Hipótese: Deixar no mesmo padrão ambos os controles, ou seja, ligar os cabos que vão nos botões na mesma ordem no player 1 e no player 2 na plaquinha zero delay, isso serve para os controles também (alavanca) tem que estarem com o conector para mesma direção (plug do cabo no controle de ambos para direita > > por exemplo). Se tiver algum botão invertido ou não esteja para o mesmo lado o plug do controle, quando configurar o controle invertido vai desconfigurar o outro e vise e versa. Isso com certeza é um bug do sistema pois entendo que deveria ser independente uma coisa da outra mas dependendo como foi feito e configurado o sistema da nisso mesmo |
|
|
ATUALIZAÇÕES – RASPBIAMPLO B10 linuxdicasesuporte.blogspot.com/2019/09... www.edivaldobrito.com.br/raspbian-para-.../ |
|


{kind=link}